双臂灵巧手机器人
注:本文有部分词汇不宜显示,已做处理,不影响整体技术介绍。
设计方案综述
本项目要求设计一款融合多种先进技术、功能强大且性能出色的智能灵巧手机器人,为♦♦和工业领域提供高效、安全、灵活的解决方案。在♦♦领域可用于侦察、装备维护和危险区域作业等,在工业领域可应用于汽车制造、电子产品生产及化工等行业,能参与高精度工序和恶劣环境下的设备维护。该机器人集成了手动遥控与自主导航、环境感知与目标识别、控制终端协同处置、精确的机械臂和灵巧手等功能,能在危险环境中代替人类完成侦察、巡检、搜索、处置等任务,并作为功能验证平台,进行功能的二次开发。项目包括智能灵巧手机器人及机器人作业管理软件。
方案效果概述
整体方案可分为硬件和软件两个部分。硬件主要指机器人整体结构、设备方案等,软件主要指作业管理软件、遥操作程序、自动驾驶程序等。
硬件部分
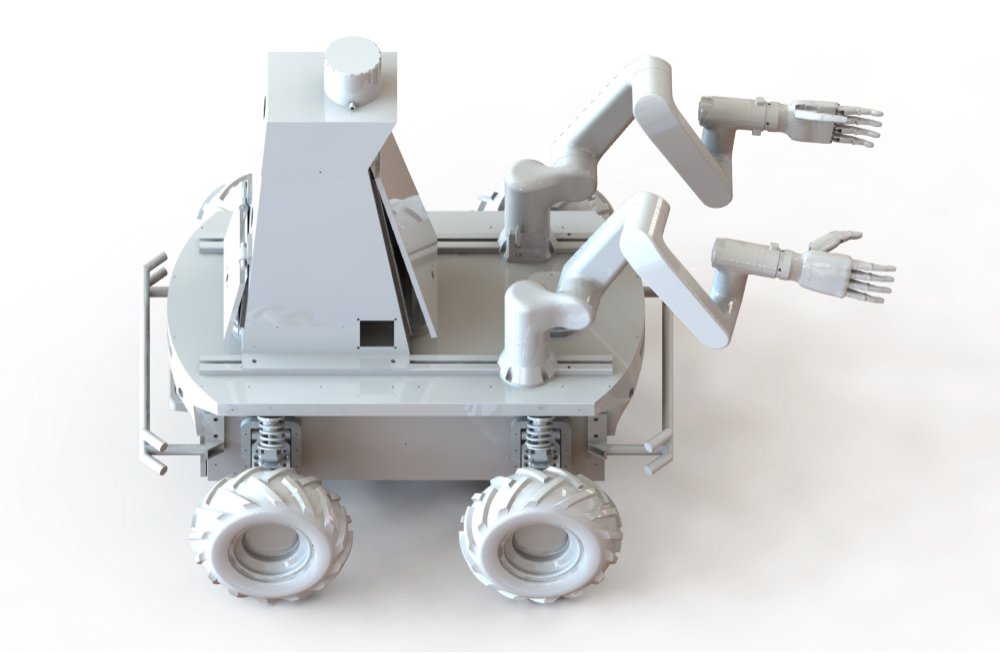
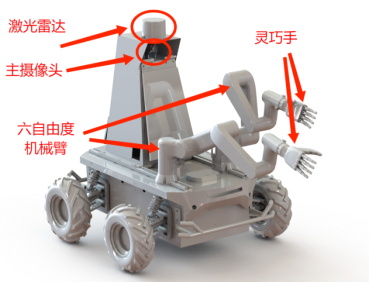
机器人整体结构可分为三个模块:线控底盘、机械臂、灵巧手。线控底盘上包含有底盘机械结构、电池仓、标配的摄像头、激光雷达等部件;机械臂为两台六自由度机械臂,提供灵活的运动支持;灵巧手作为执行机构,可一同配合实现作业任务。
线控底盘使机器人能够在复杂的地形中灵活移动,快速到达♦♦♦♦所在的位置。
机械臂和灵巧机械手能够精确地操作和处理♦♦♦♦,减少人工作业的风险。机器人搭载的机械臂具有足够的自由度和工作空间,能够将灵巧手移动到不同的位置和角度。灵巧手可通过编程示教等形式,实现准确模拟展现人手动作。
软件部分
机器人作业管理软件,主要对机器人作业进行管理,包含自动导航系统、目标监测与识别系统,分析评估系统,遥操作系统,自主作业系统,管理日志等多个模块。
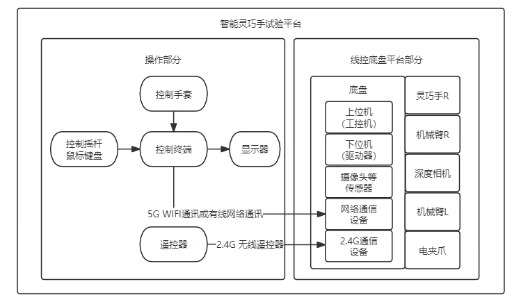
系统配备有运动遥控器、控制终端等设施或配套软件,具备超视距远程图像回传、远程遥控机器人、远程操作灵巧手等功能。
通过这款智能灵巧手机器人,可以在危险环境中代替人类进行作业,保护作业人员的生命安全,提高作业的安全性、准确性。
主要应用方向包括:
①辅助转运小型(≤4公斤)♦♦物或♦♦品;
②辅助牵引♦♦物引线,就地♦♦♦♦♦;
③旋开并移除一定体积范围内的未爆♦♦♦♦;
④♦♦或安保现场巡检,识别危险目标并预警;
⑤基于本项目的其他拓展功能,如牵引通信线路、灾害现场侦查等;
⑥用于科研载体使用。
除上述应用领域外,本项目开放二次开发接口,可自行开发额外功能。