基于树莓派的水下机器人控制器设计
摘要
目前国内国际上针对于水下机器人发表的成果大多为单独的分支,如视觉算法、运动控制算法等,也有毕业论文设计了整机方案,但是针对于水下控制装置的整体研究却基本没有。
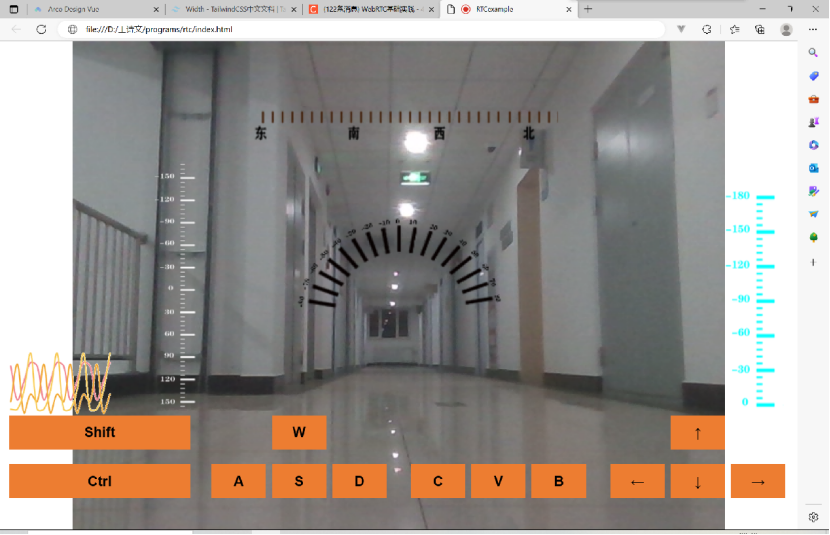
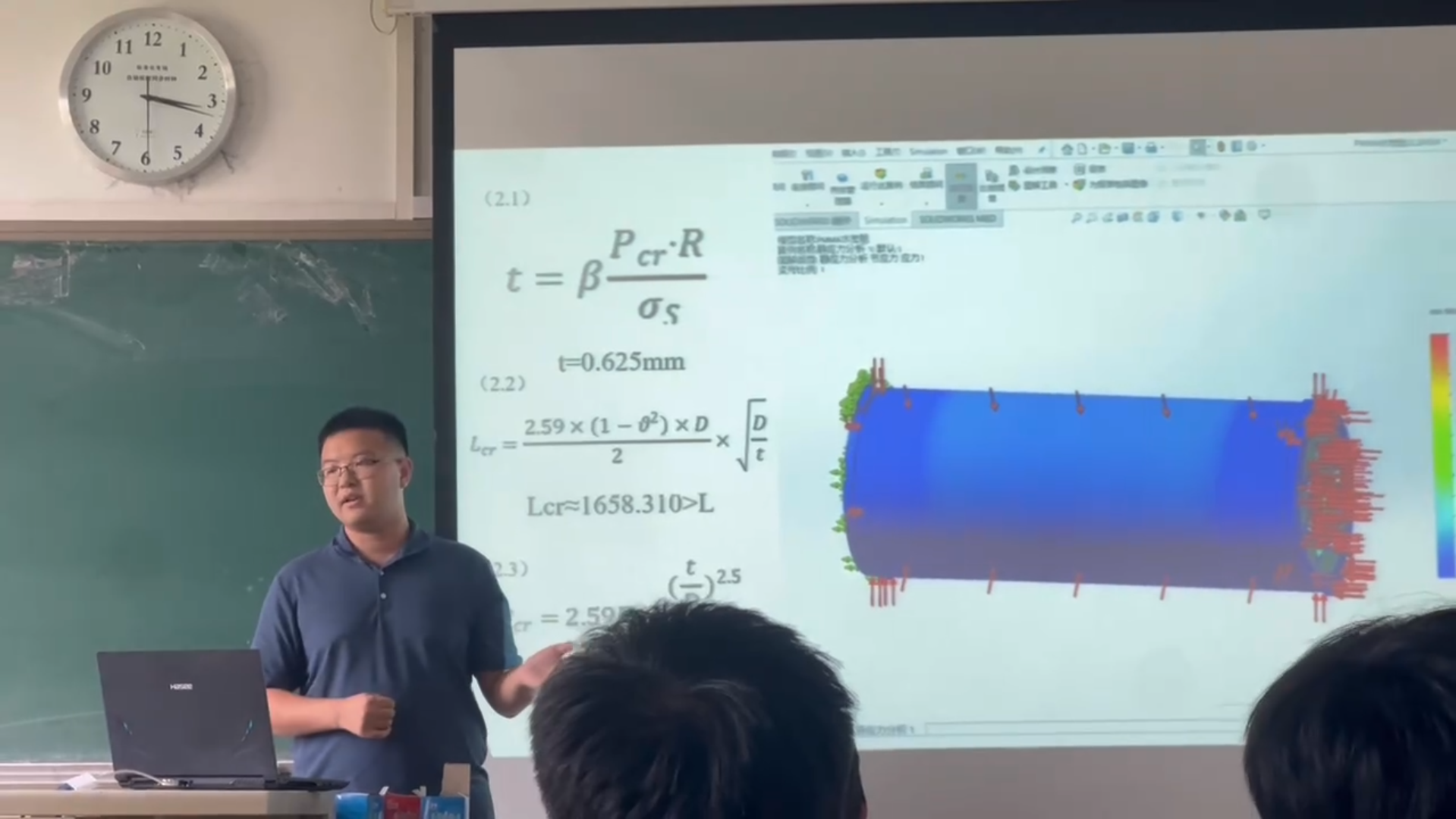
水下机器人控制装置需具备控制下发、视频回传、姿态展示、运动控制和机械臂控制等关键功能或接口。研究将着重设计控制下发和视频回传功能,兼顾耐压仓的结构设计,同时预留接口方便后续功能扩展。耐压仓应用薄壳理论、临界长度公式判断为短圆筒舱体,并计算得到耐压舱需要的壁厚。控制下发和图像回传主要使用WebRTC技术,前端界面使用三层叠加设计,底层为视频层用来显示回传的图像数据,中间层是显示层,用来显示回传的传感器数据、机体参数指标等,顶层为控制层,用来放置控制按钮,控制按钮可捕获键盘按键,实现机器人控制。各层均可独立替换,实现不同控制终端的兼容。
设计工作涉及机械、嵌入式、计算机系统、网页前后端设计、视频通信等多个领域。
关键词:水下机器人;压力容器;控制装置;模块化;嵌入式;视频通信;WebRTC;
Abstract
Currently, research results published domestically and internationally on underwater Remote Operated Vehicles (ROVs) predominantly focus on individual branches, such as visual algorithms, motion control algorithms, etc. While some graduate theses have designed complete ROV systems, comprehensive research on underwater control systems remains scarce.
ROVs control systems require key functions or interfaces such as control transmission, video feedback, attitude display, motion control, and manipulator arm control. The research will emphasize control transmission and video feedback capabilities, taking into account the structural design of pressure-resistant compartments, while providing interfaces for subsequent functional expansion. Thin-shell theory and the critical length formula are applied to determine a short cylindrical compartment for the pressure-resistant cabin and calculate the required wall thickness. Control transmission and image feedback primarily use WebRTC technology, with a front-end interface using a three-layer overlay design. The bottom layer is the video layer, displaying the feedback image data; the middle layer is the display layer, exhibiting feedback sensor data and system performance parameters; the top layer is the control layer, containing control buttons that capture keyboard inputs for ROV control. Each layer can be independently replaced to enable compatibility with different control terminals.
The design work involves multiple fields, including mechanical engineering, embedded systems, computer systems, web front-end and back-end design, and video communication.
Keywords: Remotely Operated Vehicles; Pressure-resistant hull; Control system; Modular system; Embedded; Video communication; WebRTC;